
The main mechanical components of HB2-0 were salvaged from an old power wheelchair. That includes two very heavy brushed DC motors. These motors were sized to carry an adult person so they were definitely overkill for this robot. A pair of rubber wheels, 260mm in diameter (around 10 inches), were already present on the keyed gearbox shafts, and that’s where they stayed.
In the end, I wanted HB2-0 to look akin to a Star Wars droid and I sketched a design for a direction of the shape. I knew putting the back wheel so close to the main drive wheels might be a problem for stability, but I still did not anticipate the scope of this problem while in the initial design stages.
The chassis is comprised of the two motors and gearboxes bolted onto two bars of square steel. The steel bars have holes that run though the faces and that is where I opted to fasten the gearboxes, which would later be the foothold for a complete mechanical failure. These bolts passed through the steel to secure the gearboxes to the chassis through their lids. The bolts held through to the initial testing of the robot but when accidentally dropped from 3ft off the ground, they kept half of the gearbox lid attached to the chassis and the other half went “elsewhere”.

Damage and repair to gearbox lid
The gearbox lid is a kind of part that I can’t find easily and to recreate it would be expensive as I don’t own tools for machining of any kind. I did end up providing a temporary fix to this situation with some scrap aluminum and steel epoxy. It sealed the crack in the gearbox long enough to display and test the robot at Maker Faire in 2022.
At Maker Faire, I could really put the assembly though its paces. I couldn’t go too fast for safety because there were people around but also, I don’t think HB2-0 was capable of going very fast to begin with. The motors sit upright in the robot and are a significant portion of weight. The gearboxes are also quite heavy and are below the motors but still rotate around the pivot point of the wheels. Without gravitational constraints, HB2-0 could move its motors plenty fast on the test bench, isolated from the ground. Moving on the floor is a different story.
The back wheel being so close to the drive wheels means that when the robot decelerates, the whole assembly lifts off the ground and tips forward. This means that even the slightest bump in the ground could knock and going any higher than 30 percent speed was dodgy. HB2-0 did survive tipping over a few times to its credit, but tipping would not have been a problem had I not been so greedy with wanting a small footprint, for a robot that is much too heavy. Mistakes were made, but many things were definitely learned.
The other component of HB2-0’s mechanical design was a threaded rod layer system borrowed from my self-balancing robot, just with redesigned 3D prints. Two threaded rods were installed vertically through the steel bars that held the gearboxes side by side and two rods were attached to the back wheel as well. These rods allow for precise positioning of multiple layers of 3D printed parts onto which the electronics are mounted. This was great for quickly prototyping and designing in a short time frame. I could add and modify parts very quickly. In the initial stages of design and testing that was a huge help. Later on it became a bit cumbersome because top layers had to be removed to access lower layers every time.

The threaded rods held the 3D prints and the rear wheel in place.
The 3D prints were deigned to be modular and expandable. Each part features at least one “standardized” connection. These connections were either a block or a socket of 10 x 20 x 10 mm. The blocks had brass a threaded insert melted into them with soldering iron through pilot hole. The sockets, then had a hole for an M3 bolt to hold the two pieces being assembled together. This design was excellent for my fears before Maker Faire and getting this up and running in such a short time. I was able to design the next part in CAD as the previous part was printing without fear or misunderstanding of how they would go together. Additionally, each part could be printed with a flat edge on the print bed and without support material which cut down on print time.
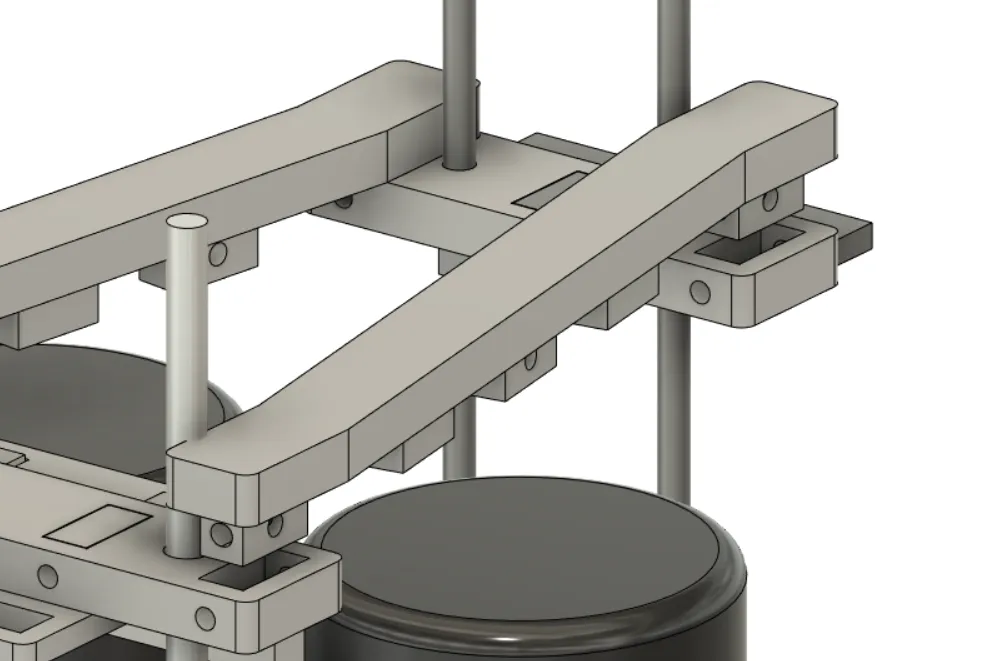
Sockets and blocks were used to create modular 3D prints
Originally I had planned to give HB2-0 an animatronic head to give it a sense of life and character. Unfortunately, the dropping disaster led to an end of the project altogether. I knew these parts were the not the most sustainable in terms of repairs form the beginning. I just did not expect to encounter that issue so soon into the project. Regardless, I learned so much about design, CAD software and testing in the field through the process of making mistakes. The design of the robot was reliant on a mixture of hardware store parts and salvaged parts. This brought the cost of the robot fairly low but the repairability of some components is what prevented the project from continuing.